Определение углового пространственного положения плоскостей
Постановка задачи
Перекосы номинально параллельных и взаимно перпендикулярных плоскостей, поворот одной из плоскостей деталей относительно другой, а также наличие отклонений при изготовлении приводят к необходимости расчёта угловых размерных цепей. Расчёт номинального значения
и предельного отклонения
замыкающего звена угловой размерной цепи, лежащей в одной или нескольких параллельных плоскостях, проводится по следующим формулам
:
,
.
Часто интересующие нас поверхности сборочной единицы лежат в перекрещивающихся плоскостях, что приводит к формированию пространственной угловой размерной цепи. Кроме того, в плоскостной и пространственной размерных цепях вычисленные координаты номинального положения конца суммарного вектора и предельные области рассеивания суммарной погрешности являются необходимой, но недостаточной информацией для решения вопроса о собираемости узла. Это объясняется тем, что в отличие от линейной размерной цепи найденные координаты конца суммарного вектора не определяют положения стыкуемых плоскостей, так как составляющие векторы в плоскостной и пространственной размерных цепях развёрнуты друг относительно друга. Таким образом, возникает необходимость в расчёте угловой пространственой размерной цепи. Важность рассматриваемой задачи подтверждается тем, что величина перекоса между стыкуемыми поверхностями пространственных трубопроводных систем аэрокосмических объектов определяет герметичность стыковых соединений и прямо влияет на надёжность и безопасность эксплуатации. В других областях машиностроения, например станкостроении, непараллельность направляющих станины и оси шпинделя токарного станка или отклонение от перпендикулярности рабочей поверхности стола сверлильного станка относительно оси вращения шпинделя непосредственно сказываются на точности обрабатываемых деталей.
Расчёт номинального углового положения
Существующие способы представления деталей на чертежах базируются на использовании плоских основных (горизонтальной, фронтальной и профильной) и дополнительных проекций, поэтому размерные связи элементов деталей всегда лежат на плоскостях проекций. Множество используемых способов задания размеров на плоскости может быть представлено в общем виде в векторной форме
, как
. Для пространственных размерных связей суммарный вектор
определяется суммой векторов, лежащих в координатных плоскостях различных (местных) систем координат, каждая из которых повёрнута на некоторый угол
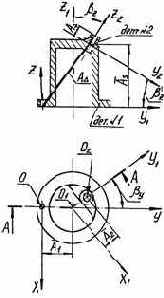
. Схема размерных связей поверхностей в сборочной единице, состоящей из двух деталей, представлена на рис. 1. Углы поворота, связывающие одну систему координат с другой, расположены в пространстве не произвольно. Они всегда лежат в плоскостях проекций и определяют направление разрезов, сечений и дополнительных видов. За положительное направление угла поворота принимаем поворот против часовой стрелки, если смотреть по направлению к началу координат. Плоскость вновь полученной системы координат будет являться секущей по отношению к исходной системе. Примем также, что плоскость XOY исходной системы координат лежит в плоскости базового фланца первой детали сборочной единицы. Сечение проекции, расположенной на горизонтальной плоскости, будет само расположено на профильной проекции новой системы координат. В свою очередь, сечение проекции, расположенной на профильной плоскости, будет само расположено на фронтальной проекции новой системы координат. И, наконец, сечение проекции, расположенной на фронтальной плоскости, будет само расположено на горизонтальной проекции новой системы координат. Суммарный вектор
(рис.2). Наличие погрешностей обработки поверхностей деталей, ограниченных допустимыми отклонениями геометрических параметров (
), приводит к образованию области суммарной погрешности замыкающего звена пространственой размерной цепи.
Расчёт пространственной области суммарной погрешности координат точки
конца суммарного вектора
рассмотрен в работе
. Если в рассматриваемой схеме пространственной размерной цепи положить
, i=1,…,n, то получим искомую пространственную угловую цепь (рис. 3). Звеньями этой цепи являются углы
,
,
с допустимыми отклонениями
,
,
, определяющие угловое положение (i+1)-го звена сборочной размерной цепи относительно предыдущего i-того звена.
На основании известных положений аналитической геометрии угловое положение повёрнутой системы координат можно определить с помощью матричного произведения вида:
, где
, а
. (1)
Поскольку углы поворота, связывающие одну систему координат с другой, всегда лежат в плоскостях проекций, то матрицы
,
,…
будут определяться поворотом системы координат только вокруг одной из осей X , Y, Z на угол
, соответственно. Таким образом, результирующая суммарная матрица
углов поворота системы координат n-звенной пространственной размерной цепи определяется как:
(2)
Диагональные коэффициенты
,
,
суммарной матрицы поворота
являются направляющими косинусами между соответствующими осями систем координат, т.е:
,
,
. Здесь i, j, k -базисные векторы исходной системы координат OХYZ, а
- произвольно повёрнутой системы координат
. Отсюда легко найти углы
,
,
между соответствующими осями координат первого и последнего звена, что позволит однозначно определить положение стыкуемой плоскости относительно исходной:
,
,
(3)
Поскольку принято, что плоскость XOY исходной системы координат лежит в базовой плоскости первой детали, то угол
определяет, кроме того, перекос плоскостей 1-го и n-го фланцев сборочной единицы.
Проиллюстрируем применение предлагаемой методики на примере. Рассмотрим сборку трёх деталей. На коробку скоростей устанавливается корпус насоса, на котором монтируется масляный угольник.
Посадочная плоскость под угольник на корпусе насоса развёрнута на угол
(вокруг оси OX) и на угол
(вокруг оси OY). В свою очередь выходная плоскость штуцера угольника повёрнута на угол
относительно оси OZ. Найдём углы
,
,
, определяющие положение штуцера угольника относительно осей посадочного фланца на коробке скоростей.
Воспользуемся выражениями (1) и (2). Тогда
,
.
Аналогично,
.
После преобразований, с учётом (3), получаем:
, (4)
, (5)
. (6)
Расчёт предельных значений суммарных углов
Проведённый анализ выражений (4,5,6) показал, что для двух и более поворотов системы координат вокруг разных осей, определить значения предельных углов
и
, а также предельных отклонений
методом “max-min” невозможно.
Представим каждое из выражений
из (4),(5),(6) в виде
. Положим
, где
-приращение независимой переменной
. Поскольку
мало (допустимые отклонения углов
существенно меньше номинальных значений),то можно
найти приращение функции
как:
. (7)
Найдём
для выражения (4).
Обозначим
,
,
Тогда, с учётом правил дифференцирования тригонометрических и сложных функций, получим
,
где
,
,
. Здесь и далее отклонения углов
должны быть выражены в радианах. После преобразований получим
.
Вводя аналогичные обозначения и проведя преобразования получим
и
для выражений (5) и (6)
.
Если
, где
- верхнее отклонение углов
соответственно, то
.
Если
, где
- нижнее отклонение углов
соответственно, то
.
Тогда:
;
;
.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Дунаев П.Ф. Размерные цепи. М.: Машгиз, 1963, 308с.
2. Дёмин Ф.И. Исследование размерных связей соединений и передач при конструировании и изготовлении изделий // Изв. вузов.- Авиационная техника. 1982. №1.
3. Дёмин Ф.И., Бейлин А.Б. Расчёт области суммарной предельной погрешности пространственной размерной цепи // Технологические пути повышения качества изготовления авиадвигателей: Сб. науч. тр. Куйбышев: КуАИ, 1986. С. 32-40.
4. Пулькин С.П. Вычислительная математика. М.: Просвещение, 1972. 270с.
Бейлин Александр Борисович родился в 1948 г., окончил Куйбышевский авиационный институт. Кандидат технических наук, доцент. Автор 33 научных работ в области размерного анализа конструкций.